 |
|||
|
Page Title:
Figure 4-32.--Block diagram of the roll and pitch follow-up system. |
|
||
| ||||||||||
|
|
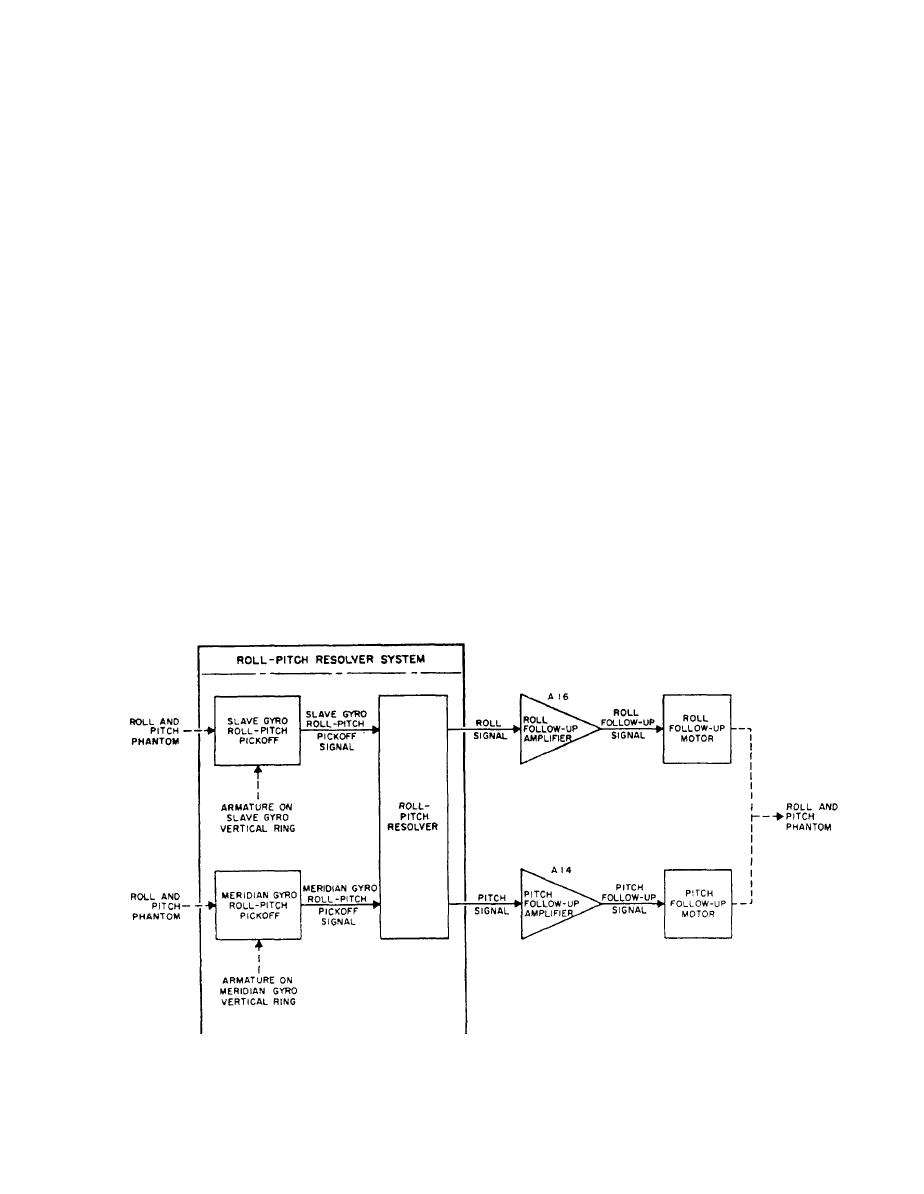 gimbal ring. It positions the roll-pitch phantom about
roll-pitch phantom and the level position maintained by
the roll axis, through the gimbal ring.
data transmitters. The system consists of two E-core
On a north-south course, the pickoff signal from the
pickoffs, two follow-up amplifiers, and two follow-up
meridian gyro roll-pitch pickoff, if fed through the pitch
motors, all duplicates of the corresponding components
follow-up amplifier to the pitch follow-up motor, would
in the azimuth follow-up system. In addition, the system
compensate for the effect of pitch. Similarly, if the
includes a roll-pitch resolver.
pickoff signal from the slave gyro roll-pitch pickoff
were fed through the roll follow-up amplifier to the roll
The meridian gyro roll-pitch pickoff is mounted on
follow-up motor, it would compensate for the effect of
the meridian gyro cradle and detects any misalignment
roll.
between the cradle and the meridian gyro's vertical ring.
This misalignment is about the meridian gyro's
On an east-west course, however, the meridian gyro
east-west horizontal axis. The roll-pitch phantom, being
roll-pitch pickoff would have to be fed to the roll
physically linked to the azimuth phantom, will be
follow-up amplifier and motor, to compensate for roll,
identically misaligned with the vertical rings of both
and the slave gyro roll-pitch pickoff would have to be
gyros.
fed to the pitch follow-up amplifier and motor, to
The slave gyro roll-pitch pickoff is mounted on the
compensate for pitch. It follows, therefore, that on any
slave gyro cradle and detects any misalignment between
intermediate course, the roll-pitch motions of the ship
will have components acting about both north-south and
the cradle and the slave gyro's vertical ring. This
misalignment is about the slave gyro's north-south
east-west axes, and both roll -pitch pickoffs will react to
horizontal axis. Thus, any misalignment between the
both roll and pitch. As a result, the two pickoff signals
must be divided into proper proportions to each
roll-pitch phantom and the vertical ring of either gyro
follow-up amplifier and motor to maintain the
produces a roll-pitch pickoff signal.
horizontal stability of the roll-pitch phantom. The own
A pitch follow-up motor is mounted on the gimbal
ship's course determines these proper proportions, and
ring and meshed with the pitch gear on the roll-pitch
they are obtained from the roll-pitch resolver.
phantom. It positions the roll-pitch phantom about the
pitch axis. A roll follow-up motor is mounted on the
The roll-pitch resolver has its rotor positioned
support assembly and meshed with the roll gear on the
corresponding to own ship's course by the azimuth
4-30
|
|
Privacy Statement - Press Release - Copyright Information. - Contact Us |
